My Contribution
1.
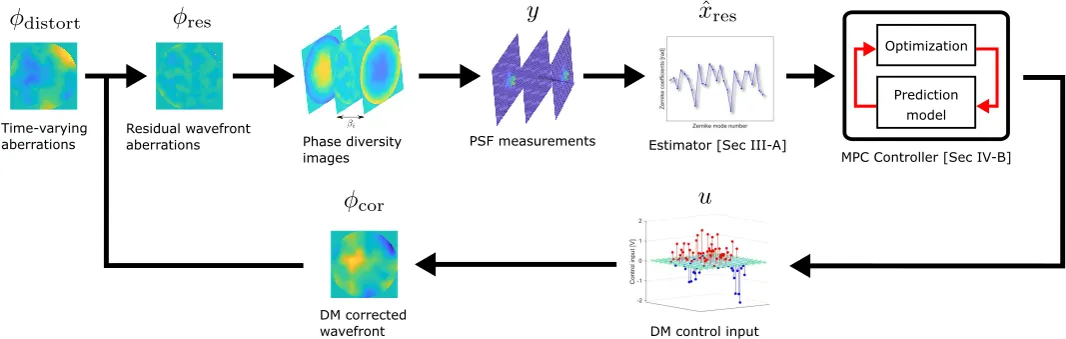
Developed MPC method to compensate for time-varying aberrations in a sensorless adaptive optics.
2.
Reduced computation time by deriving approximate model for point spread function.
3.
Applied fast MPC, which approximates the primal barrier method to make constrained OCP feasible in real-time.
Flowchart for the compensation of time-varying aberrations in sensorless AO
In Details
Time-varying aberrations based on the Kolmogorov model
1.
Wavefront aberration comparison
•
True aberration (Kolmogorov)
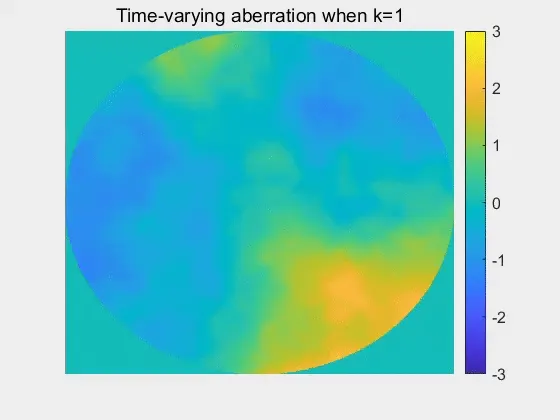
•
Predicted aberration (VAR model)
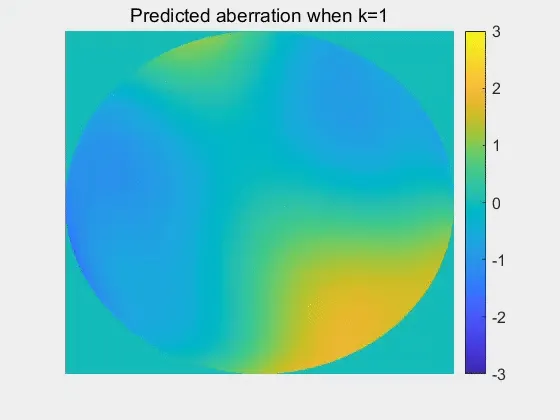
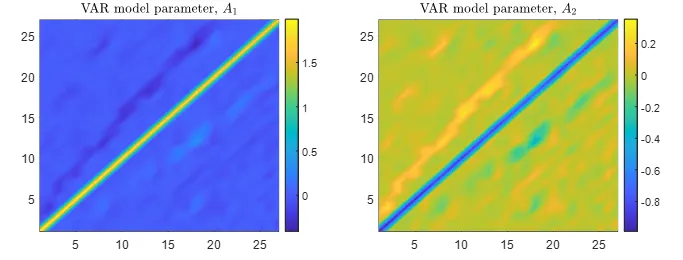
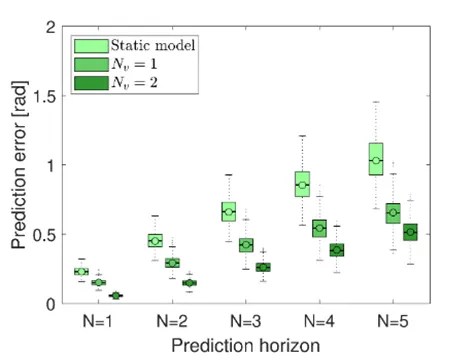
2.
Vector-valued AutoRegressive (VAR) model
•
model parameter ()
•
Prediction error
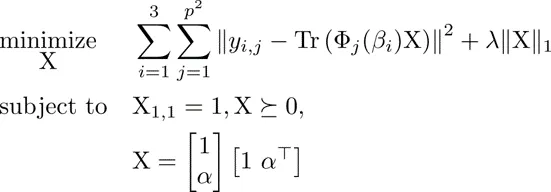
Point Spread Function (PSF) approximation for state estimation
•
Taylor-series approximation

1.
Solution
•
Least-squares (first-order model)

•
Convex SDP (second-order model)
2.
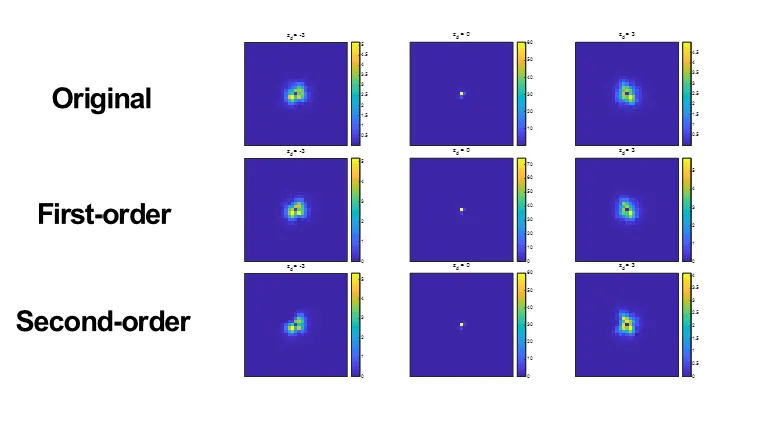
Comparison by approximation model order
•
Approximation model error ()
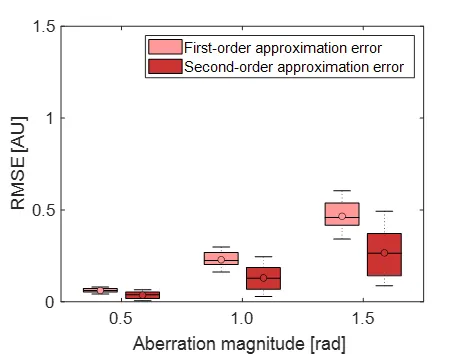
•
PSF 2D Image
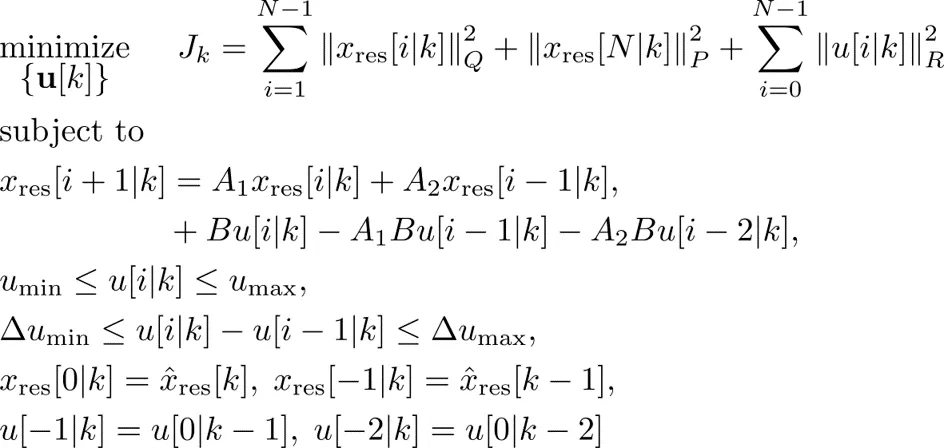
MPC Problem Formulation
Design an MPC problem that minimises residual wavefront aberration
•
Consider hardware constraints on the DM and ramp-rate constraints on the actuator’s applied voltage.
Numerical Simulations
1.
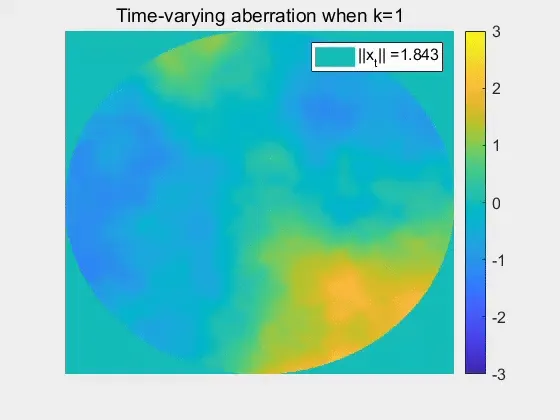
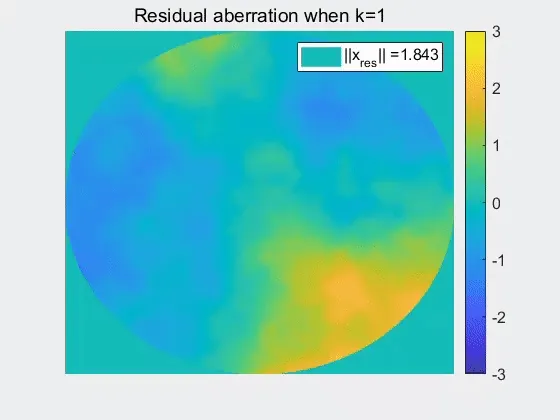
Residual wavefront aberrations
•
Before correction
•
After correction
2.
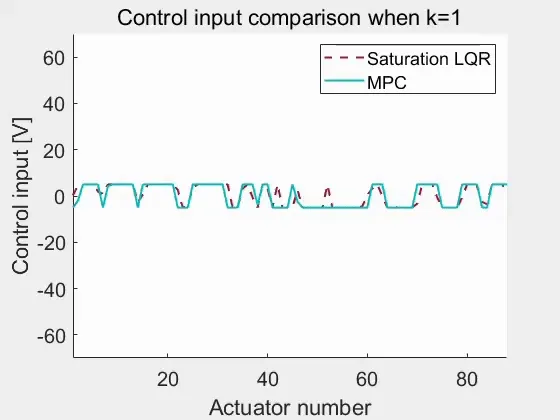
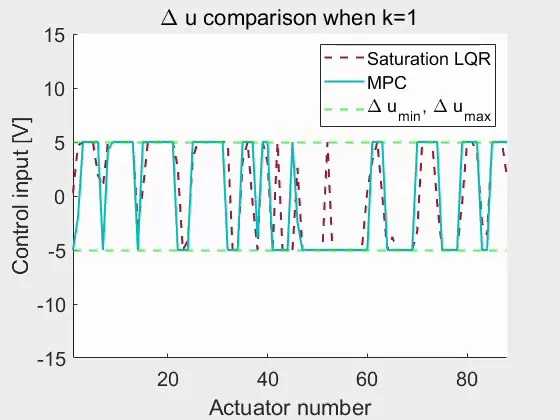
Comparison by Saturation LQR solution
•
Control input
•
Ramp-rate of control input
3.
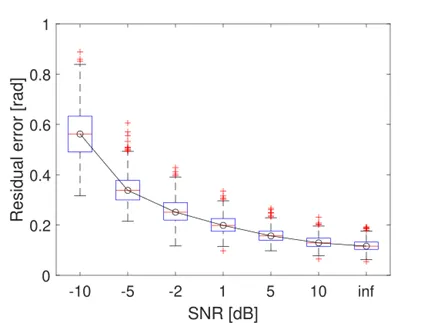
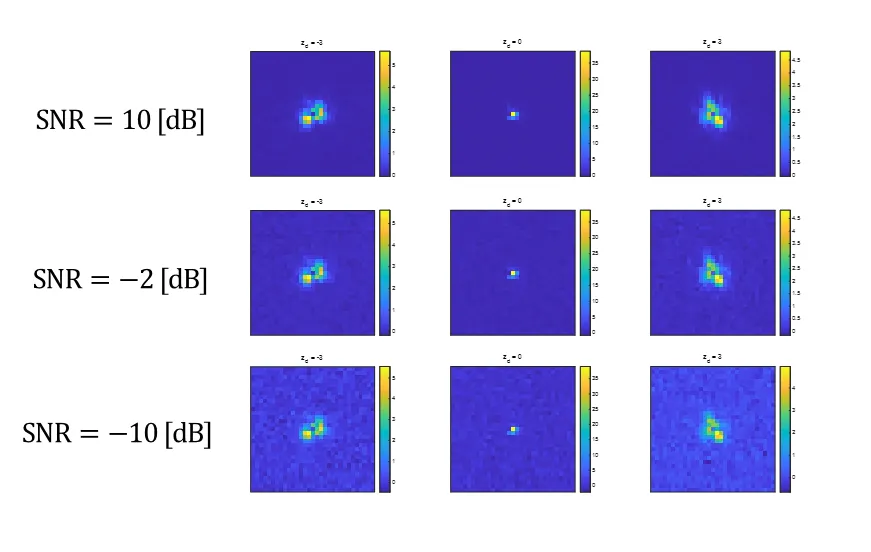
Robustness to measurement noise
•
PSF 2D Image for different noise
•
Residual error box plot according to the noise level